医療・福祉デバイス
グループ紹介
医療・福祉分野での応用を目指したデバイスの開発を行っています.軽量で安全性の高い医療福祉機器として自走式大腸内視鏡,車椅子転落防止ウェア,小児用義手などを開発しています.
研究内容
車椅子転落防止用ウェアラブル装置
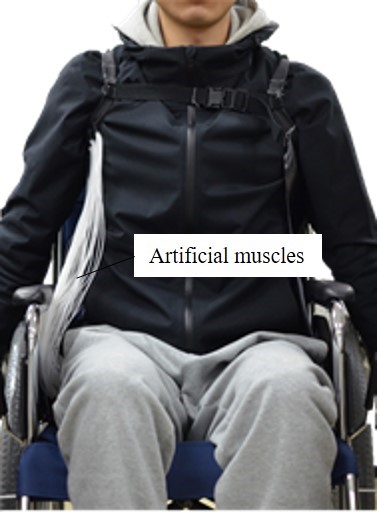
筋力の低下や脳卒中による片麻痺の症状が原因で座位保持が困難な車椅子利用者に対し,座位保持を補助する
ウェアラブル装置を開発している.
本研究では柔軟なMcKibben型人工筋を用いることで着用者の日常動作を阻害しないウェアラブル装置を製作
した.体の傾きを検知可能な感圧センサと併用することで転落する危険性がある角度まで上体が傾くと上体を起
こし転落を回避することを目指す.
小児用義手

世界中に先天的,後天的な理由で手を欠損した小児が数多く存在し,小児用義手の開発が盛んに進められている.
本研究では駆動源に細径McKibben型人工筋を使用した前腕動力筋電義手の開発を行っている.指の関節をシリコー
ンゴム製,ボディを樹脂製とすることで小型軽量かつ安全性にも配慮した義手となっている.また,小型コンプレッ
サや圧縮空気を貯蓄するタンク等を持つ携帯可能な駆動システムの構築も行っている.
(大阪工業大学・広島国際大学との共同開発)
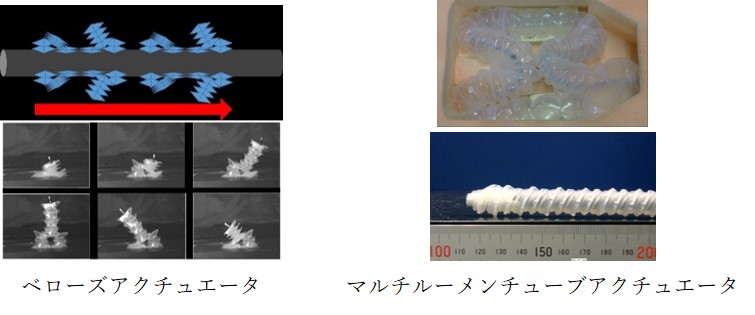
大腸内視鏡支援アクチュエータ
大腸内視鏡の挿入には医師の高い技術が必要であり,挿入が容易ではない場合もある.安全で容易に挿入が可能な大腸内視鏡の実現を目指した2種類の空気圧アクチュエータを開発している.一つはベローズアクチュエータであり,もう一つは,マルチルーメンチューブアクチュエータである.両アクチュエータともに空気圧駆動であり柔軟性が高い.これらを大腸内視鏡に取り付けることで内視鏡に自走性を付加する.