人工筋制御
グループ紹介
機能性繊維を複合することで新たな機能を有する次世代空気圧人工筋や人工筋制御用の小型流体制御デバイスの開発を行っています.
研究内容
スマート人工筋
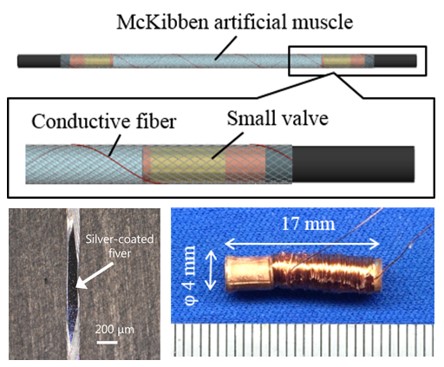
McKibben型人工筋は空圧で駆動する.一般に空圧制御機器は人工筋に比べて大きく重い.したがって,人工筋駆動に適したコンパクトな制御システムが求められる.
本研究では,スマート人工筋の開発を行っている.センサとして導電性繊維を人工筋のスリーブ内に編みこみ,独自製作した小型バルブを人工筋の両端に内蔵した.実験の結果,これらの繊維センサと小型バルブを用いて人工筋内の圧力を制御することができた.
センサ複合ソフトロボットフィンガの開発
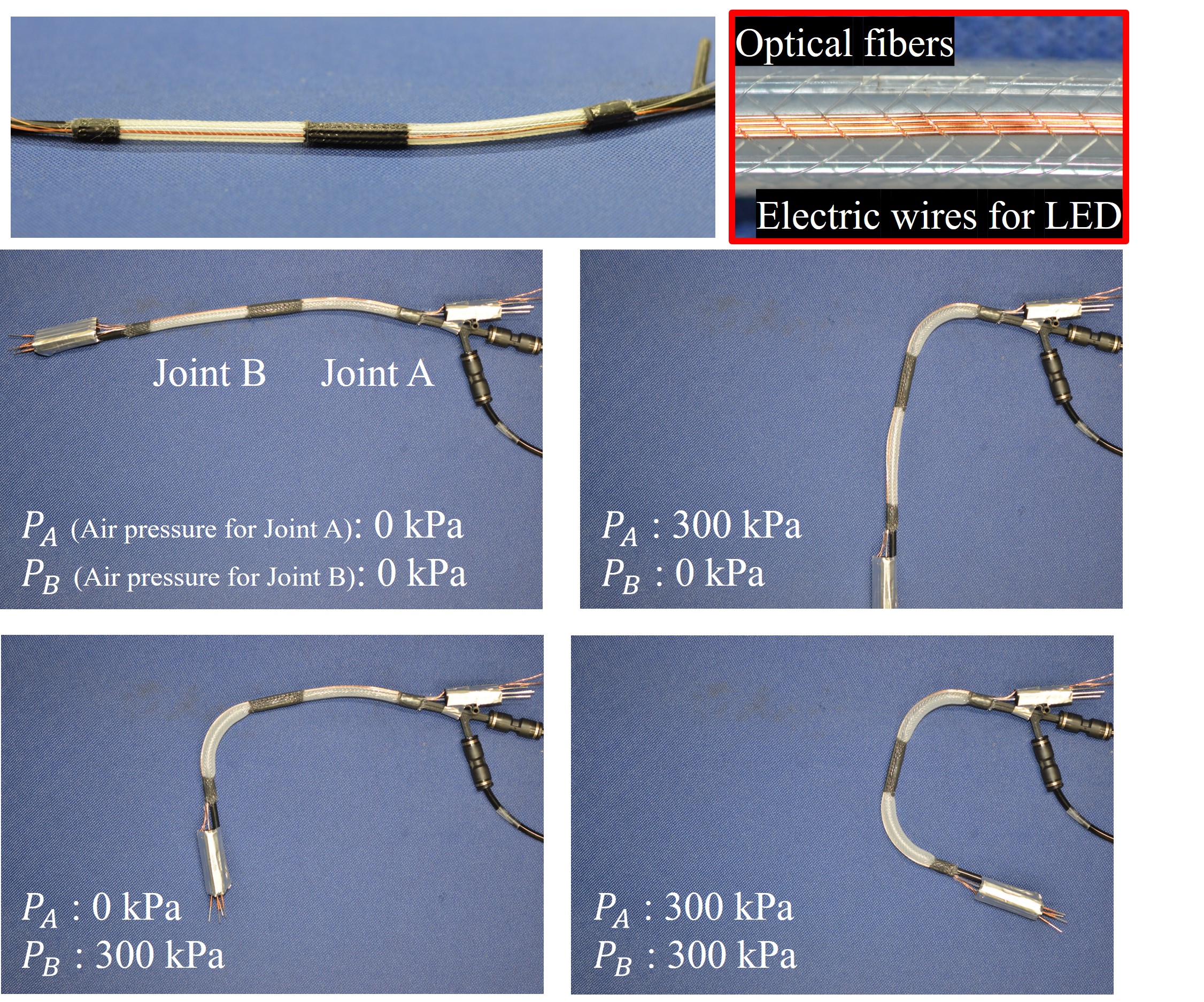
McKibben型人工筋肉の片側に非伸縮材を取り付けることで、湾曲運動が実現できる。また、非伸縮材として光ファイバセンサを用いることで、湾曲量を推定可能な“湾曲型スマート人工筋肉“が実現できる。本研究では、2つの駆動関節を持ち、各関節の湾曲量を推定できる”2関節湾曲型スマート人工筋肉”を開発している。ひも製造技術を応用した容易な製作プロセスを実現する。
公益財団法人JKA「2023年度 ひも製造技術を応用したセンサ複合ソフトロボットフィンガの開発 補助事業」
解説資料

SMP繊維複合人工筋
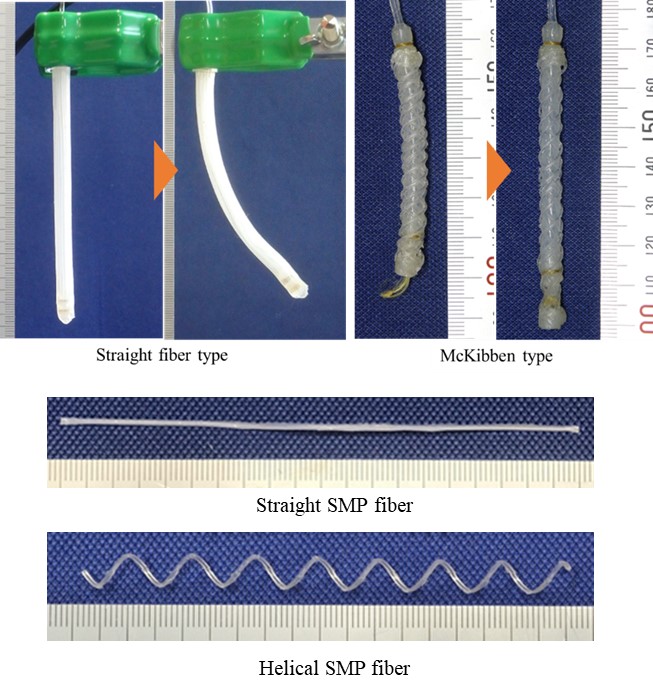
空気圧人工筋の動作はゴムチューブを覆う繊維の形状によって決定される.一方,形状記憶ポリマー(SMP)は, ポリマー成型後でも任意形状に形状を固定できる形状固定性を有する高分子材料である. 本研究ではSMPを繊維状に 成型し,これ人工筋の繊維として用いるSMP繊維複合人工筋を開発している.SMPは 形状を自由に変更できるため,簡素な構造で様々な駆動特性の実現が可能となる.軸方向繊維強化型人工筋, McKibben型人工筋を対象として開発 を行っている.
小型三方弁
近年,出力の大きさや耐衝撃性の観点から油空圧,水圧を用いた流体アクチュエータがロボットの
駆動源として注目され,応用されている.しかし,ロボットの多自由度化には多くの流体制御コンポ
ーネントが必要となり,結果としてシステム全体が大型化する傾向にある.そのため流体制御コンポ
ーネントの小型化が求められている.
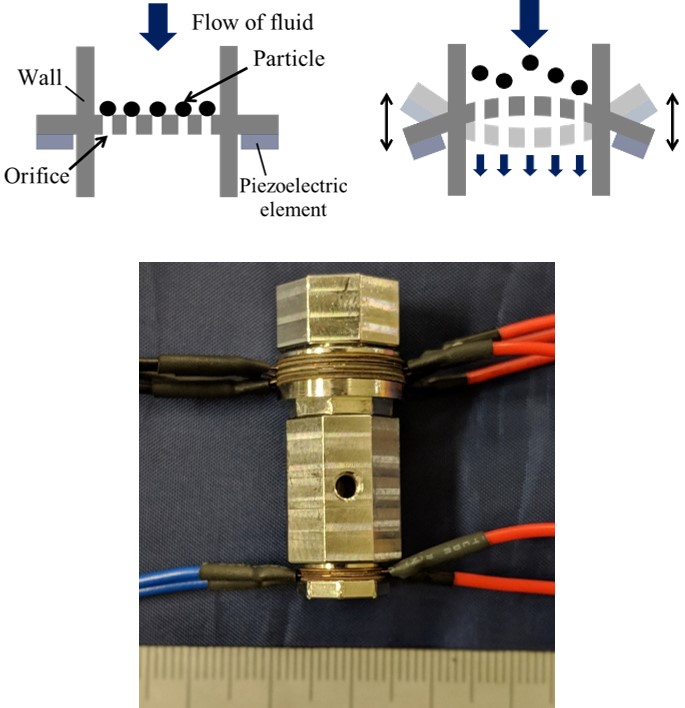
本研究では,小型な流体制御システムの実現のため,効果の高い制御弁の小型化を目的としている.
これまで圧電振動子を用いた小型軽量な微粒子励振型制御弁が開発されており,水や油を作動流体と
した流量制御が可能であることが確認されている.また,その微粒子励振型制御弁を2組用いた三方
弁の製作,それによる流体アクチュエータの駆動を実現している.