バイオミメティクス
グループ紹介
人工筋などのソフトアクチュエータにより生物の構造や動きを模倣した機構を構築しています.柔軟なロボットアームや軽量移動機構などを開発しています.
研究内容
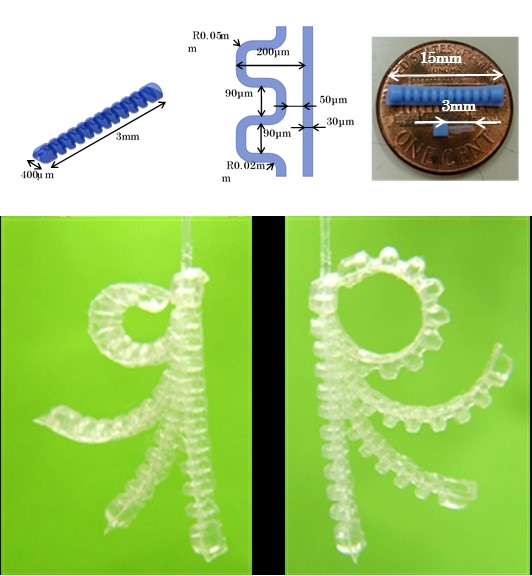
細径McKibben型人工筋
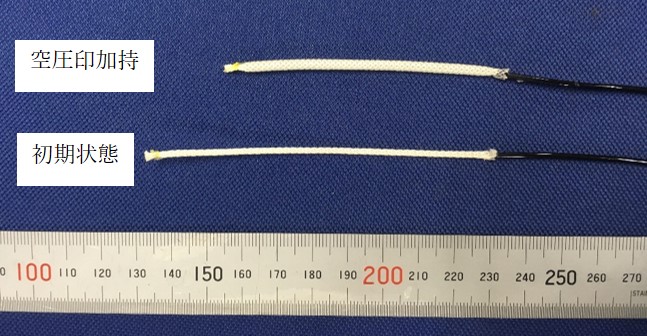
McKibben型人工筋は空気圧で駆動する軽量・柔軟・高出力なソフトアクチュエータである.本人工筋はゴムチューブとそれを覆う編み込んだ繊維のスリーブで構成される. 本研究室では直径1.8mm~という細径のMcKibben型人工筋の量産を実現している.細く非常に柔軟なため,様々な形状での集積化や小型の装置への組み込みが可能である.安全・柔軟・軽量といった特長を活かし医療デバイス・福祉用機器・生物模倣ロボットなどへの適用を行っている.
多自由度扁平メカニズム
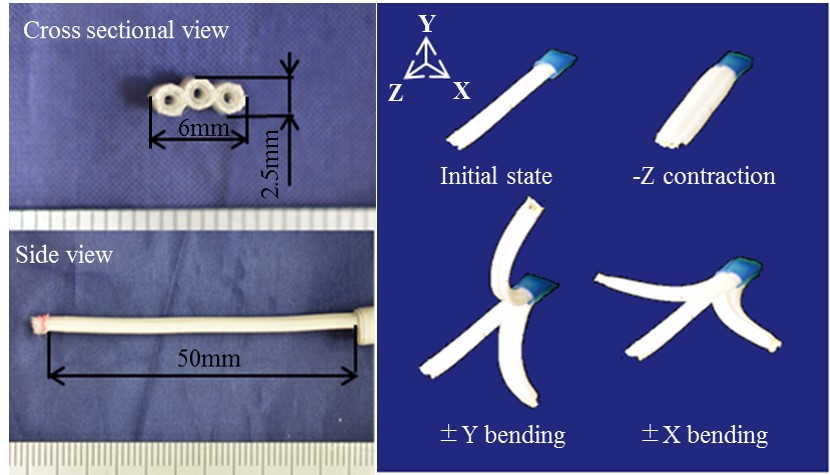
狭隘部での移動探索ロボットやウェアラブルアシスト装置は薄型かつ多自由度な機構とすること理想的で ある.
本研究では細径McKibben型人工筋を用いて,上記の特徴を満たす柔軟なメカニズムの開発を行っている. このメカニズムは3本の細径人工筋によって構成されており,その構造は非線形有限要素法解析によって決定 されている.製作した実機は2.5
mmの厚みながら,任意の方向と曲率の湾曲と軸方向への収縮の3自由度動 作が可能である.
タコの腕を模倣した柔軟ロボットアームの開発
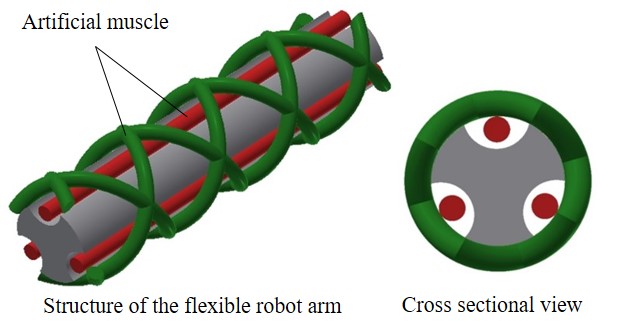
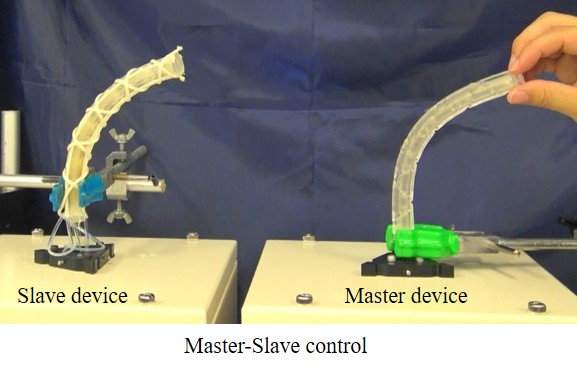
タコの腕は筋肉と神経のみで構成され,柔軟で複雑な動作が可能である.本研究では,細径のMcKibben型人工筋を用いてタコの腕構造を模倣した柔軟なロボットアームの開発と制御を行っている.柔軟ロボットアームは,湾曲・収縮・ねじれの各動作とそれらの複合動作が実現できる.また,ロボットアームの直感的な操作を可能とするため,マスター機の動きをスレーブ機にトレースするマスタースレーブ方式による制御を行っている.
大湾曲ラバーアクチュエータ
正・負圧の空気圧を利用することで,単純な構造でありながら2方向へ大きな湾曲動作が実現できるアクチュエ ータを開発している.
本アクチュエータは蛇腹構造と板構造のラバー構造体からなり,正・負圧の印加による蛇腹部の伸長・収縮によ って2方向に湾曲することが可能である.マイクロハンドやイレウスチューブのステアリング機構などへの応用を 行っている.