Medical & Welfare Device
Group Introduction
We have developed soft and safe devices for medical and welfare fields. A self-propelled colonoscope, a wearable device for preventing accidents of wheel chair users, and a prosthetic hand for children have been fabricated.
Research Introduction
Wearable device for wheelchair fall prevention

In this study a wearable device that assists safe sitting posture of wheelchair users who have difficulty of maintaining their sitting posture due to symptoms of hemiplegia due to muscle weakness or stroke. We have developed the wearable device that does not hinder the daily movement of a wearer by using flexible McKibben artificial muscles and a seat pressure sensor which can estimate tilt angle of the body. The system works to raise the upper body of a subject when the body tilts to a dangerous angle for falling down from the wheelchair.
Prosthetic hands for children

There are many children who lost their hands due to congenital disease
or accident, and the development of prosthetic hands for children is proceeding
actively.
In this research, we designed and fabricated the powered upper limb prosthesis
for children and its driving system. The prosthesis consists of thin McKibben
artificial muscles and the driving system is composed of a small compressor
and a tank for portability. The prosthesis has high safety owing to compliance
of artificial muscles.
( Cooperative research groups, Osaka Institute of Technology and Hiroshima
International University)
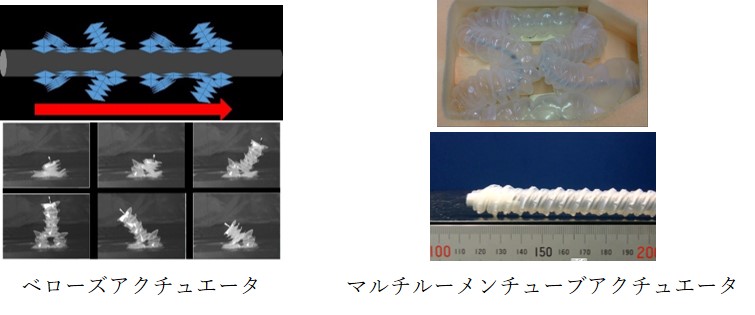
Colonic endoscope support actuator
Insertion of the colonoscope is not easy procedure and high skills of doctors are required. In this research, for aiming safe and easy colonoscopy, two kinds of pneumatic actuators have been developed. One is the pneumatic bellows actuator and the other is the multi lumen tube actuator. Both actuators are driven pneumatically and the colonoscope with these actuators has the self-propelling ability.