Biomimetics
Group Introduction
By utilizing soft actuators like artificial muscles, we have developed biomimetic mechanisms which imitate structure/motion of creatures. A soft robot arm, a mobile mechanism and so on have been realized.
Research Introduction
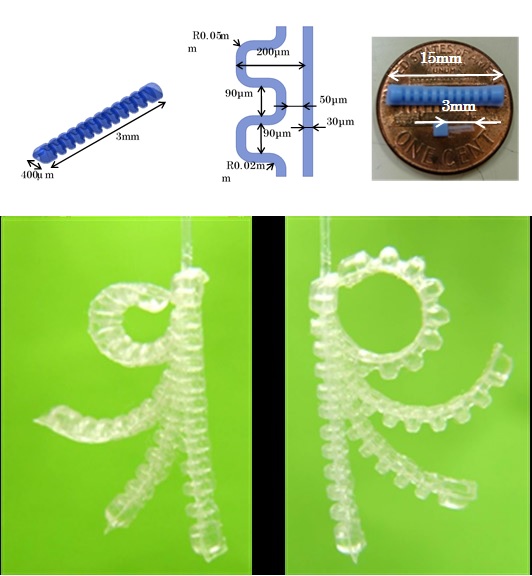
Thin McKibben artificial muscle
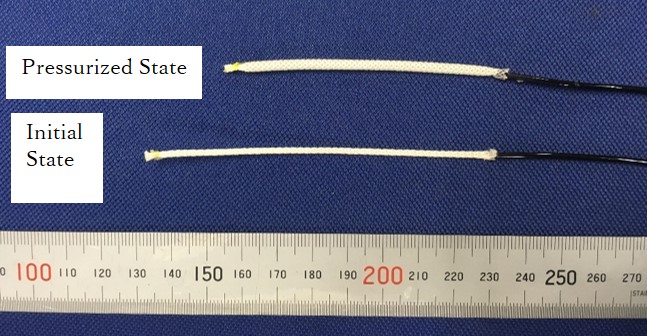
McKibben artificial muscle is a pneumatic soft actuator with features of light weight, inexpensive and have high output power. The muscle is configured with an inner rubber tube and outer sleeve of knitted fibers. In our laboratory, thin McKibben artificial muscles of diameter 1.8mm and their mass production process have been realized. Because the artificial muscles are thin and very flexible, they can be bundled with arbitrarily shape and embedded into small robotic mechanisms. We have been applying the artificial muscles to medical devices, welfare machines and biomimetic robots.
Multi-DOF Flat Mechanism
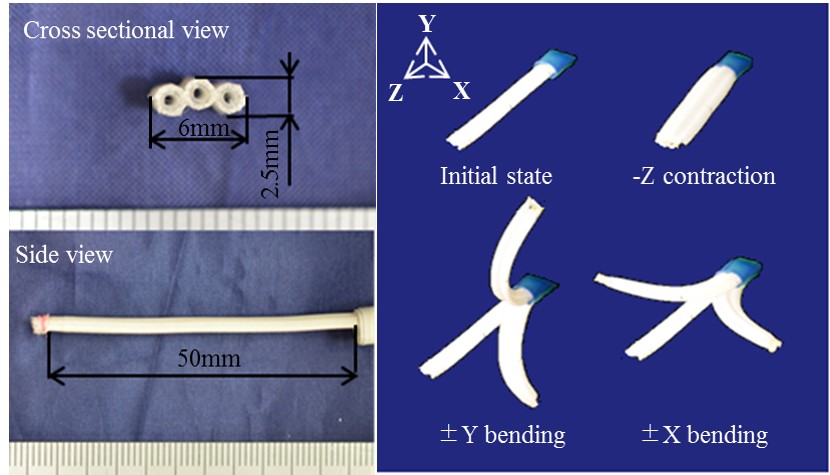
Thin and light weight mechanisms realizing multiple degrees of freedom
motion are suitable for mobile robots in narrow space or wearable assist
devices.
In this research, we have developed such thin and multi DOF mechanism
configured with three thin McKibben artificial muscles. The structure of
the mechanism was determined by Nonlinear Finite Element Method (FEM).
The actual fabricated mechanism of thickness 2.5 mm realizes three degree
of freedom motion, contraction in axial direction and bending in any direction
and curvature.
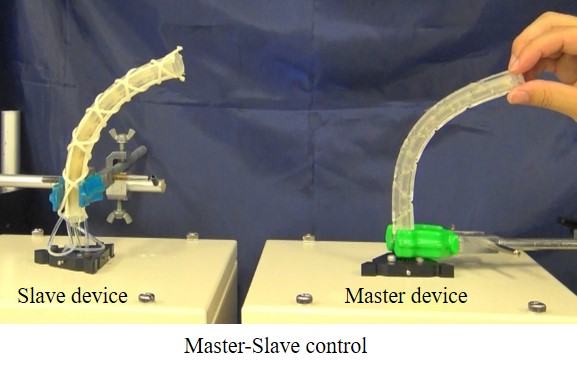
Development of a flexible robot arm imitating octopus' arms
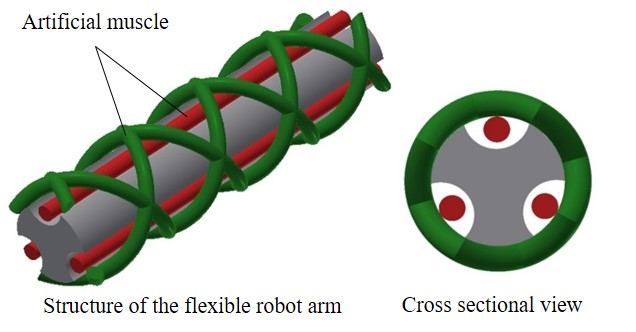
Octopus arms are composed muscles arranged in several directions and nerves arranged in center of the arms. They are flexible and perform complicated movement. In this research, a flexible robot arm imitating the octopus arms structure by thin McKibben artificial muscles has been developed. The flexible arm can realize bending, contracting, twisting and their combined motions. In addition, for intuitive operation, the master-slave system has been established.
Large bending rubber actuator
We have developed an actuator which can realize large bending motion
in two directions by using positive and negative air pressure although
it is a simple structure.
This actuator consists of bellows-shaped and plate-shaped rubber structure,
and it can bend in two directions by elongation / contraction of the bellows
portion by application of positive and negative pressure. We are applying
this actuator to the robotic hand and the steering mechanism of ileus tube.