Artificial Muscle Control
Group Introduction
We have developed next generation artificial muscles by combining functional fibers and miniature fluidic devices for controlling artificial muscles.
Research Introduction
Smart artificial muscle
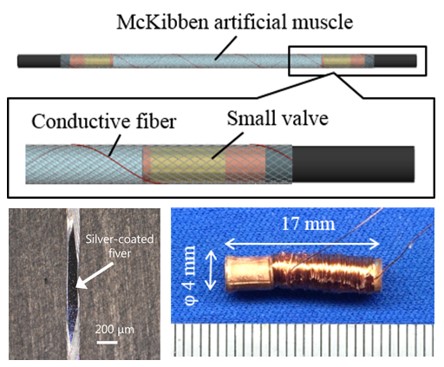
A McKibben artificial muscle is driven pneumatically. Generally pneumatic
control devices are larger and heavier than the artificial muscle. Therefore,
compact pneumatic control devices for the artificial muscles are required.
In this study, we have developed a smart artificial muscle. A conductive
fiber as the sensor was knitted into the sleeve and fabricated small valves
were embedded into the artificial muscle. Experimentally we confirmed that
the internal pressure of the artificial muscle was able to be changed by
the valves and the sensor output.
SMP fiber composite artificial muscle
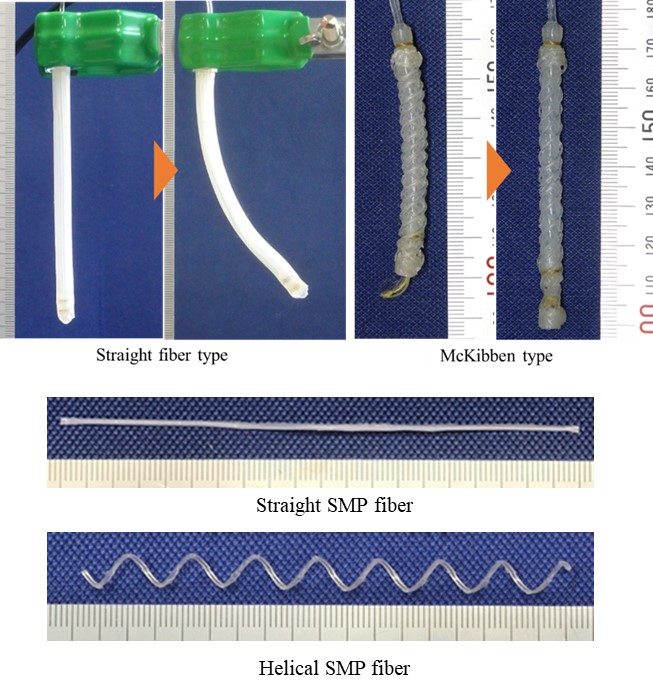
The motion of the pneumatic muscles is determined by the arrangement and shape of the fibers. On the other hand, SMP (Shape Memory Polymer) has function of shape fixity, it can be deformed in any shape. In this study, we have fabricated SMP fibers and embedded into artificial muscles. Two types of the muscles, the straight fiber type muscle and the McKibben type muscle have been developed. The muscles with SMP fibers realize variable driving characteristics with simple structure by shape fixity effect of SMP.
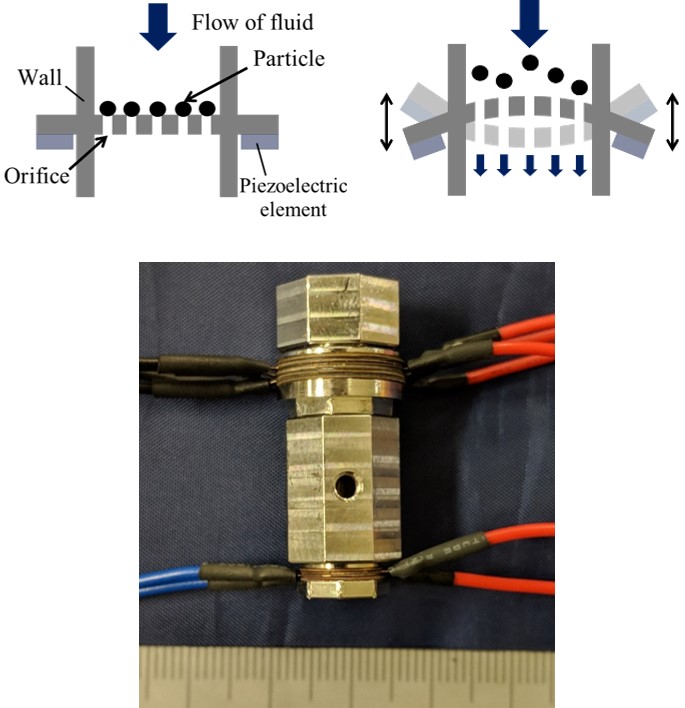
Small flow control valve
Hydraulic actuators are expected to be applied to robots because they have a small size, large power, and low damage. However, the hydraulic control systems for multiple degrees of freedom robots are large because such systems have many control components. The purpose of this research is to develop a small hydraulic flow control valve. We fabricated a small flow control valve using particle excitation by PZT vibrator for a hydraulic system. We developed a three-way valve using two PZT vibrators. Inlet and outlet vibrators can be switched by applying different driving frequencies because two vibrators have different natural frequencies.